Abstract
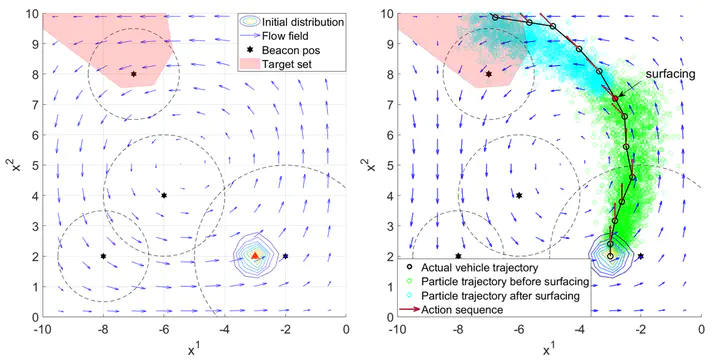
We propose a memory-constrained partition-based method to extract symbolic representations of the belief state and its dynamics in order to solve planning problems in a partially observable Markov decision process (POMDP). Our K-means partitioning strategy uses a fixed number of symbols to represent the partitions of the belief space and ensures the parameterization of the belief dynamics does not grow exponentially as the system dimension increases. By casting our problem as a partitioning of the POMDP, we can then solve planning problems using traditional symbolic planning solvers (such as HTN or A* solvers). Our work is motivated by an autonomous underwater vehicle navigation problem where the vehicle is affected by uncertain flow conditions and receives severely limited position observations. Simulation experiments are provided to validate the performance of the proposed algorithms.
Mengxue Hou
Assistant Professor, Electrical Engineering
My research interests include robotic autonomy, mobile sensor networks, and human robot interaction. I aim to devise practical, computationally-efficient, and provably-correct algorithms that prepare robotic systems to be cognizant, taskable, and adaptive, and can collaborate with human operators to co-exist in a complex, ever-changing and unknown environment.