Mori-Zwanzig Approach for Belief Abstraction with Application to Belief Space Planning
Abstract
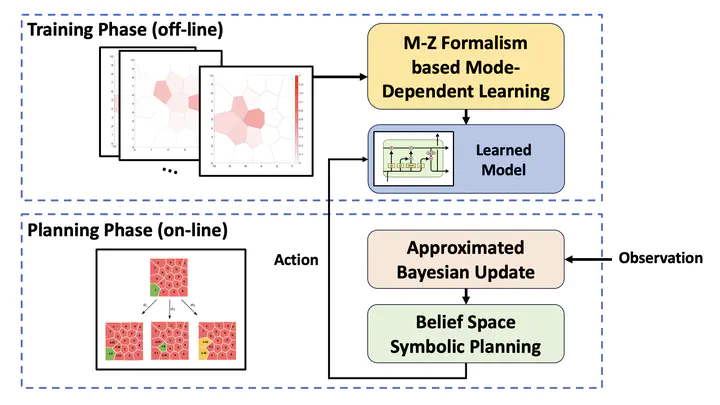
We propose a learning-based method to extract symbolic representations of the belief state and its dynamics in order to solve planning problems in a continuous-state partially observable Markov decision processes (POMDP) problem. While existing approaches typically parameterize the continuous-state POMDP into a finite-dimensional Markovian model, they are unable to preserve fidelity of the abstracted model. The first major contribution of this paper is we propose a Neural Network based method to learn the non-Markovian transition model based on the Mori-Zwanzig (M-Z) formalism. Different from existing work in applying M-Z formalism to autonomous time-invariant systems, our approach is the first work generalizing the M-Z formalism to robotics, by addressing the non-Markovian modeling of the belief dynamics that is dependent on historical observations and actions. The second major contribution is we theoretically show that modeling the non-Markovian memory effect in the abstracted belief dynamics improves the modeling accuracy, which is the key benefit of the proposed algorithm. Simulation experiment of a belief space planning problem is provided to validate the performance of the proposed belief abstraction algorithms.
Mengxue Hou
Assistant Professor, Electrical Engineering
My research interests include robotic autonomy, mobile sensor networks, and human robot interaction. I aim to devise practical, computationally-efficient, and provably-correct algorithms that prepare robotic systems to be cognizant, taskable, and adaptive, and can collaborate with human operators to co-exist in a complex, ever-changing and unknown environment.