Abstract
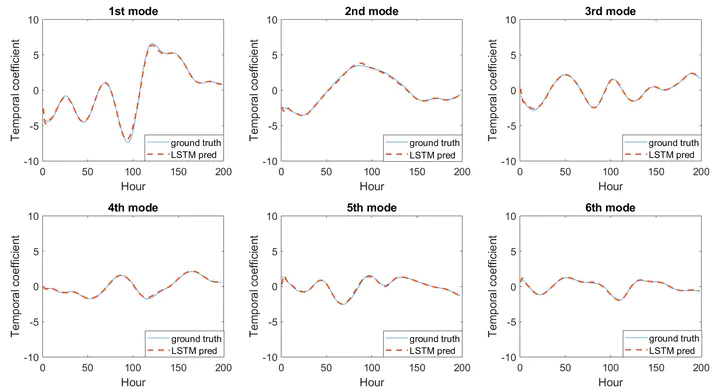
In this paper, we present a Long Short-Term Memory (LSTM)-based Kalman Filter for data assimilation of a 2D spatio-temporally varying depth-averaged ocean flow field for underwater glider path planning. The data source to the filter combines both the Eulerian flow map with the Lagrangian mobile sensor data stream. The depth-averaged flow is modeled as two components, the tidal and the non-tidal flow component. The tidal flow is modeled with ADCIRC (Advanced Three-Dimensional Circulation Model), while the non-tidal flow field is modeled by a set of spatial basis functions and their time series coefficients. The spatial basis functions are the principal modes derived by performing EOF (Empirical Orthogonal Functions) analysis on the historical surface flow field measured by high frequency radar (HFR), and the temporal coefficients of the spatial basis function are modeled by an LSTM neural network. The Kalman Filter is performed to combine the dynamics derived from the LSTM network, and the observations from the glider flow estimation data. Simulation results demonstrate that the proposed data assimilation method can give flow field prediction of reasonable accuracy.
Mengxue Hou
Assistant Professor, Electrical Engineering
My research interests include robotic autonomy, mobile sensor networks, and human robot interaction. I aim to devise practical, computationally-efficient, and provably-correct algorithms that prepare robotic systems to be cognizant, taskable, and adaptive, and can collaborate with human operators to co-exist in a complex, ever-changing and unknown environment.