Mori-Zwanzig formalism based belief abstraction for uncertainty-aware decision-making
Abstract
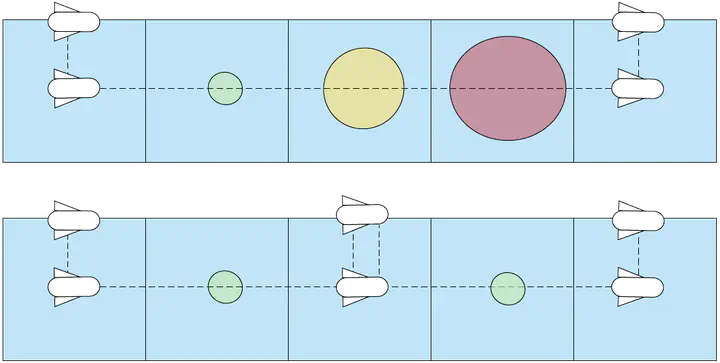
Decision-making in partially observable environments is one of the key challenges in robotic autonomy. In this talk, I will address the continuous-state POMDP (Partially Observable Markov Decision Process) problem using a reduced-order approximation method. We develop a belief abstraction algorithm that allocates a fixed number of symbols representing the belief state, and ensures the parameterization of the belief dynamics does not grow exponentially as the system dimension increases. Based on the Mori-Zwanzig formalism, a novel learning algorithm is developed to improve accuracy of the reduced-order belief dynamics. We prove that incorporating the learning algorithm leads to a time-uniform model reduction error bound. We consider marine autonomy as an example of POMDP, and use numerical simulations to show that the proposed algorithm supports real-time decision-making of underwater vehicles in unknown environment, with lower model reduction error.
Mengxue Hou
Assistant Professor, Electrical Engineering
My research interests include robotic autonomy, mobile sensor networks, and human robot interaction. I aim to devise practical, computationally-efficient, and provably-correct algorithms that prepare robotic systems to be cognizant, taskable, and adaptive, and can collaborate with human operators to co-exist in a complex, ever-changing and unknown environment.