Bounded Cost Path Planning for Underwater Vehicles Assisted by a Time-Invariant Partitioned Flow Field Model
Abstract
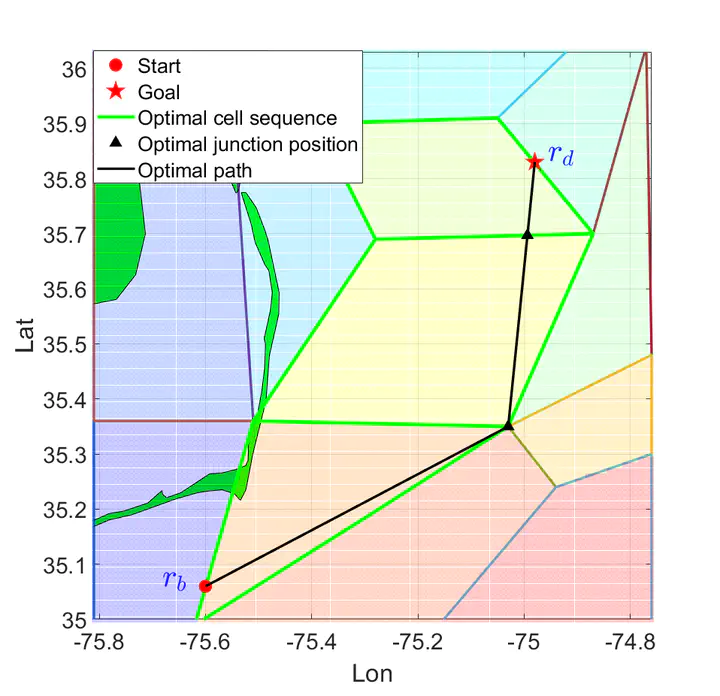
A bounded cost path planning method is developed for underwater vehicles assisted by a data-driven flow modeling method. The modeled flow field is partitioned as a set of cells of piece-wise constant flow speed. A flow partition algorithm and a parameter estimation algorithm are proposed to learn the flow field structure and parameters with justified convergence. A bounded cost path planning algorithm is developed taking advantage of the partitioned flow model. An extended potential search method is proposed to determine the sequence of partitions that the optimal path crosses. The optimal path within each partition is then determined by solving a constrained optimization problem. Theoretical justification is provided for the proposed extended potential search method generating the optimal solution. The path planned has the highest probability to satisfy the bounded cost constraint. The performance of the algorithms is demonstrated with experimental and simulation results, which show that the proposed method is more computationally efficient than some of the existing methods.
Mengxue Hou
Assistant Professor, Electrical Engineering
My research interests include robotic autonomy, mobile sensor networks, and human robot interaction. I aim to devise practical, computationally-efficient, and provably-correct algorithms that prepare robotic systems to be cognizant, taskable, and adaptive, and can collaborate with human operators to co-exist in a complex, ever-changing and unknown environment.