Biography
I received B.S. degree in Electrical Engineering from Shanghai Jiao Tong University, Shanghai, China, in 2016, and PhD in Electrical and Computer Engineering from Georgia Institute of Technology, Atlanta, GA, USA in 2022. From Aug. 2022 to Jun. 2023, I was a Lillian Gilbreth Postdoc Fellow, in College of Engineering, Purdue University, West Lafayette, USA. My research interests include robotics, autonomy, and human robot collaboration. I aim to devise practical, computationally-efficient, and provably-correct algorithms that prepare robotic systems to be cognizant, taskable, and adaptive, and can collaborate with humans to co-exist in a complex, ever-changing and unknown environment.
P.S. Pronounciation of my first name is “mung-shway”. You can also call me Meng.
- Robotics
- Autonomy
- Machine Learning
- Human Robot Teaming
PhD in Electrical and Computer Engineering, 2022
Georgia Institute of Technology, Atlanta, GA, US
BS in Electrical Engineering, 2016
Shanghai Jiao Tong University, Shanghai, China
Research Experience
Advisors: Prof. Shaoshuai Mou, Prof. Shreyas Sundaram
- Human Robot Collaboration
- Multi-agent Systems
Advisor: Prof. Fumin Zhang
- Marine Autonomy
- Task and Motion Planning
- Nonlinear Filtering
Recent News
[07/25] Our lab successfully uses underwater vehicle to help water sampling in UNDERC. See here for the videos/pics!
[06/25] I gave a talk on 2025 Midwest ML Symposium titled ``High fidelity Neuro-Symbolic Model Learning for Robotic Planning", at University of Chicago, Chicago, IL!
[08/24] Welcome Zongyao to ROAR Lab!
[08/23] Welcome Xiaoran and Yu to ROAR Lab!
[08/23] I have started as assistant professor at University of Notre Dame!
Research
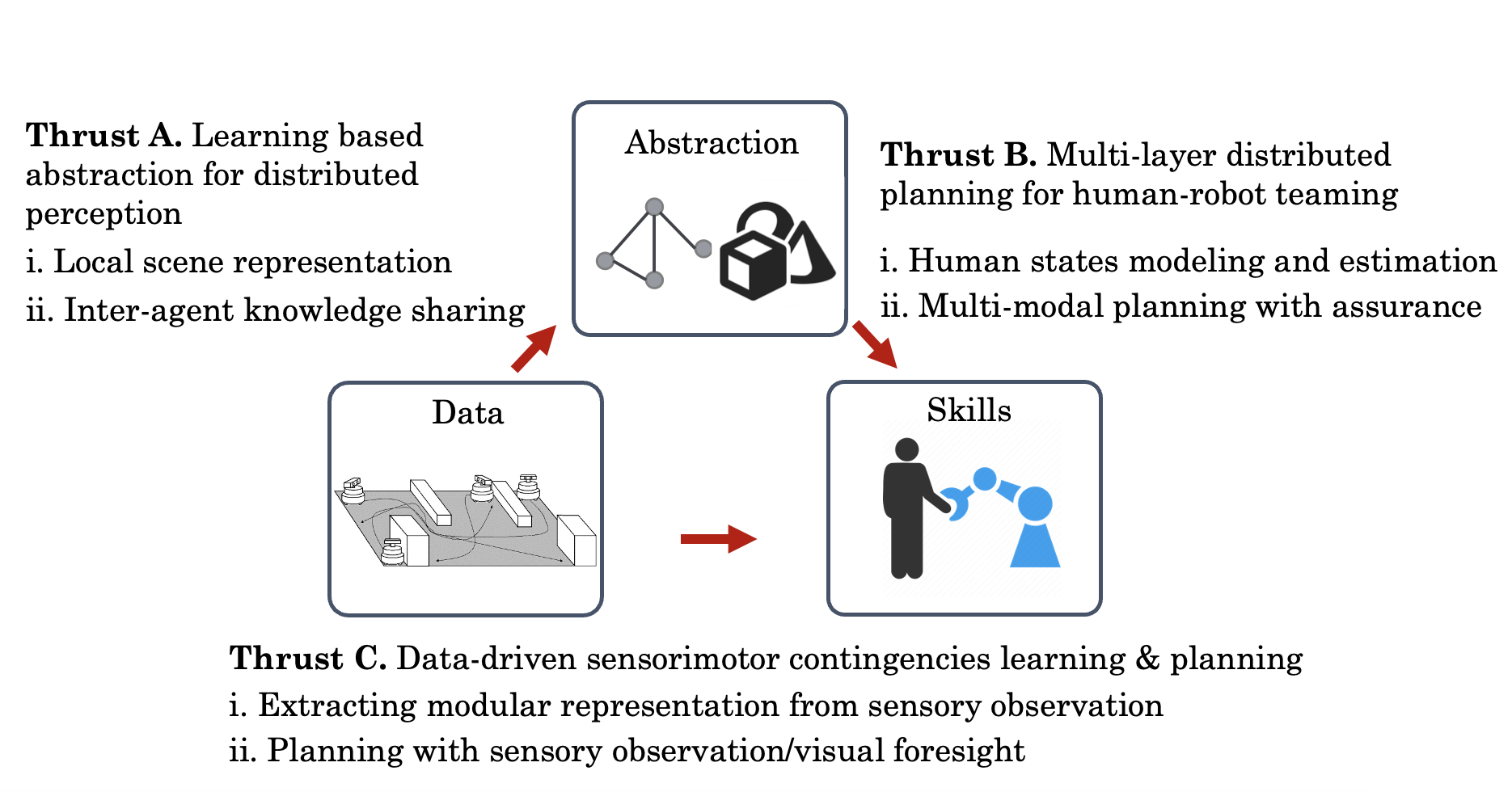
To enable exploration of unstructured and dynamic open worlds, robotic systems have to collaborate with human operators to co-exist in a complex, ever-changing and unknown environment, and should feature behaviors that are cognizant, adaptive, and taskable: the robots need to be aware of their capabilities, identify the changes in environmental dynamics, learn from past experiences to improve system performance, and understand high-level instructions to plan multi-modal strategies that are dependent on the context in which the system is operating. Such features result in the following research questions:
Cognizant: how to represent the agent’s knowledge in an unstructured environment, without a pre-defined set of scene parameters?
Taskable: how to efficiently discover useful multi-modal distributed strategies for human-robot teams?
Adaptive: how to learn from past sensory data to build skills that can adapt over time to the particularities of the environment?
In this context, my research focuses on foundational advances in robotics and autonomy. I aim to devise practical, computationally-efficient, and provably-correct algorithms that prepare autonomous systems working synergistically with human operators to explore unknown, unstructured and dynamic environments. I will also seek to develop robotic platforms to validate the autonomy algorithms. The underlying hypothesis in my research is that the interactions between agents and the environment provide rich information: on one hand, the robot can leverage its actions and observed effects to train a high-fidelity prediction model (Thrust A). The learned model enables planning and control synergies of interaction policy for human-robot team (Thrust B). On the other hand, the robot can also use the historical perception data to directly learn the skills to achieve efficient sensorimotor understanding and planning (Thrust C).


Publications
Students
Please visit ROAR (Robotics and Autonomy Research) lab website for more information.
![]()
Teaching
Teaching at University at Notre Dame
EE 67074-AI Planning: from Graph Search to Reinforcement Learning, Fall 2024
EE 20221-Signal and Information Systems, Spring 2024
EE 67074-AI Planning: from Graph Search to Reinforcement Learning, Fall 2023
Teaching at Georgia Institute of Technology
ECE Vertically Integrated Projects (VIP), Course Instructor, Fall 2018 - Spring 2019
ECE 2026, Introduction to Signal Processing, Teaching Assistant, Fall 2016 - Summer 2017
Contact
- mhou at nd.edu
- 574-631-8015
- 226B Cushing Hall, University of Notre Dame, Notre Dame, IN 46556